PFP, Spring 2018
Red-Black Trees
Red-black trees are binary search ordered trees that are roughly balanced, resulting in O(log n) membership, insertion, and deletion operations. The code for this lecture can be found in RedBlackTree.elm.
All non-empty nodes in a red-black tree are colored red or black.
type Color = R | B
type Tree a = E | T Color (Tree a) a (Tree a)By convention, we will draw square boxes for Black nodes and round circles for Red nodes:
We define height and size of trees as before:
height t = case t of
E -> 0
T _ l _ r -> 1 + max (height l) (height r)
size t = case t of
E -> 0
T _ l _ r -> 1 + size l + size rInvariants
A tree t is a valid red-black tree if:
tsatisfies the binary search order property. That is,bso t == True, where (UPDATE 5/24: Fixed the original buggy version.)bso t = let nonDecreasing xs = case xs of x1::x2::rest -> x1 <= x2 && nonDecreasing (x2::rest) _ -> True in nonDecreasing (toList t) toList : Tree a -> List a toList t = case t of E -> [] T _ left x right -> toList left ++ [x] ++ toList right {- BUGGY VERSION: -------------------------------- bso t = case t of E -> True T _ l x r -> (l == E || root l < x) && (r == E || x < root r) && bso l && bso r root t = case t of T _ _ x _ -> x E -> Debug.crash "root" -------------------------------------------------}No red node in
thas a red child. That is,noRedRed t == True, wherenoRedRed t = case t of E -> True T R (T R _ _ _) _ _ -> False T R _ _ (T R _ _ _) -> False T _ l _ r -> noRedRed l && noRedRed rEvery path from the root of
tto a leaf contains the same number of black nodes. That is,okBlackHeight t == True, whereokBlackHeight t = case blackHeight t of Just _ -> True Nothing -> False blackHeight t = case t of E -> Just 0 T c l _ r -> blackHeight l |> Maybe.andThen (\n -> blackHeight r |> Maybe.andThen (\m -> if n /= m then Nothing else if c == B then Just (1 + n) else Just n ))Note that we do not include
Enodes in path lengths. WhenblackHeight t == Just n, we refer tonas the black height oft.bh t = case blackHeight t of Just n -> n Nothing -> Debug.crash "bh"
To summarize the invariants:
rb t = bso t && noRedRed t && okBlackHeight tBalance Property
A consequence of the noRedRed invariant is that the longest path from root to leaf in a red-black tree is one that starts and ends with red and alternates between red and black in between. The shortest path is one that consists only of black nodes. Because of the okBlackHeight invariant, the number of black nodes on the shortest and longest paths is equal. Therefore, the longest path in a red-black tree (i.e. its height) is at most twice the length of the shortest path (i.e. its black height). Specifically:
- [Max Height] ∀
t.rb t⇒height t≤(2 * bh t) + 1
In-Class Exercise. Prove:
- [Min Size] ∀
t.rb t⇒size t≥2^(bh t) - 1 - [Balance] ∀
t.rb t⇒height t≤2(log(1 + size t)) + 1
Thus, the height of a red-black tree t of size n is O(log n).
Membership
Finding an element in a red-black tree proceeds just like finding an element in an unbalanced binary search tree (cf. findBST).
member : comparable -> Tree comparable -> Bool
member x t = case t of
E -> False
T _ l y r ->
if x == y then True
else if x < y then member x l
else member x rInsertion
When not worrying about maintaining the balancedness of a binary search tree, the insertion procedure walks down a path in the tree making left and right turns as necessary according to the order property. Then, if the element is found nowhere in the tree, it is added as a leaf.
A naive approach is simply to add a black node at this final position, satisfying the noRedRed invariant but violating the okBlackHeight property. Another approach is to add a red node at this final position, satisfying the okBlackHeight property but violating noRedRed.
Instead, the idea behind the insertion algorithm is to color the new node red, possibly resulting in temporary red-red violation, and then to walk back up the search path fixing and propagating any violations upwards. The algorithm maintains the invariant that at most one red-red violation is allowed at a time.
The ins function walks down the search path, inserts a red node as the new leaf, and walks back up the search path calling balance to fix any temporary red-red violations.
ins : comparable -> Tree comparable -> Tree comparable
ins x t =
case t of
E -> T R E x E
T c l y r ->
if x == y then t
else if x < y then balance c (ins x l) y r
else balance c l y (ins x r)The balance function looks for red-red violations, which can occur in one of four configurations. In each case, the solution is the same.
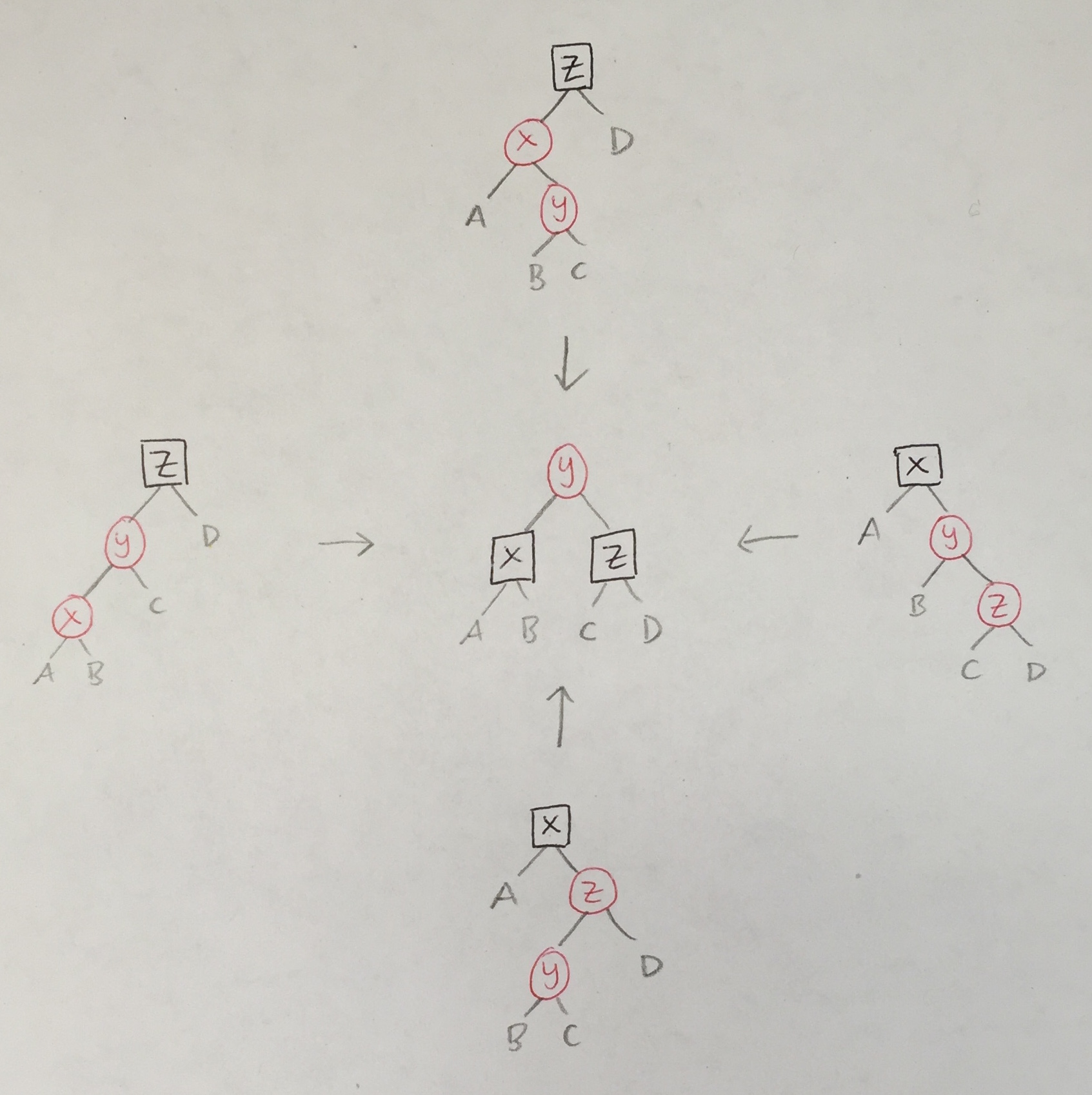
In code:
balance : Color -> Tree comparable -> comparable -> Tree comparable -> Tree comparable
balance c l val r =
case (c, l, val, r) of
(B, T R (T R a x b) y c, z, d) -> T R (T B a x b) y (T B c z d)
(B, T R a x (T R b y c), z, d) -> T R (T B a x b) y (T B c z d)
(B, a, x, T R (T R b y c) z d) -> T R (T B a x b) y (T B c z d)
(B, a, x, T R b y (T R c z d)) -> T R (T B a x b) y (T B c z d)
_ -> T c l val rThe balance function fixes a red-red violation when processing a black parent node that contains it. If ins propagates a red-red violation all the way up to the root, there is no call to balance to fix it. Therefore, the last step in the insertion algorithm is to color the new root node black (which has no effect if it already was black). Alternatively, we could leave the root red if it has no red child.
insert : comparable -> Tree comparable -> Tree comparable
insert x t =
case ins x t of
T _ l y r -> T B l y r
E -> Debug.crash "insert"Deletion
Next time, and in Homework 5…
Reading
Required
- Okasaki, Chapter 3.3